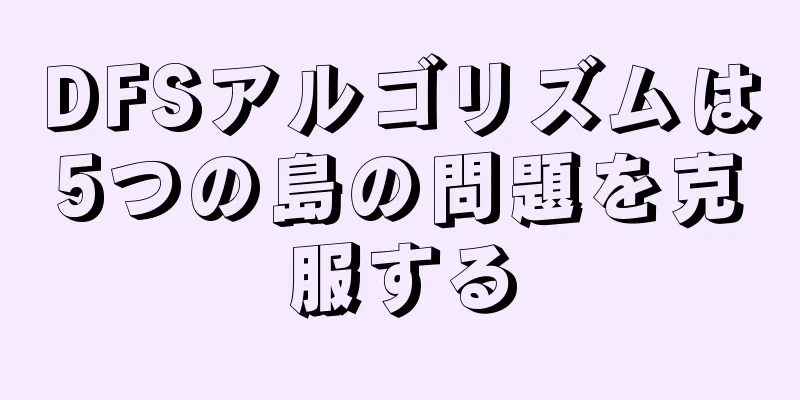
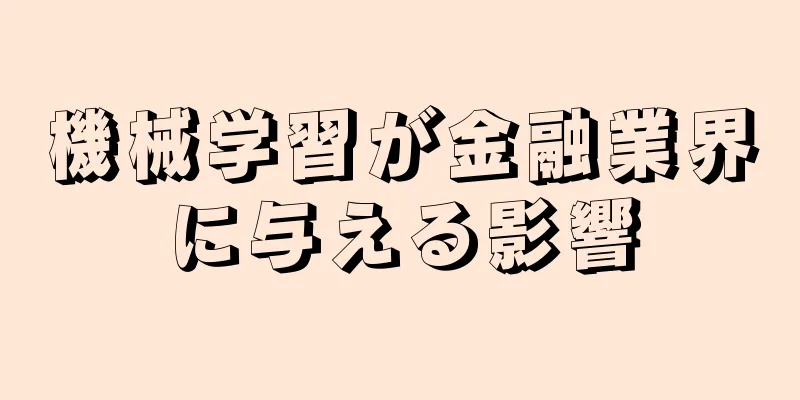
人工筋肉ロボットアームは本物そっくりで、白熱した議論を巻き起こす。7kgのダンベルを持ち上げる際、その「筋肉」がはっきりと見える。
|
この記事はAI新メディアQuantum Bit(公開アカウントID:QbitAI)より許可を得て転載しています。転載の際は出典元にご連絡ください。 ロボットアームは今日では珍しいものではありません。 しかし、7kgのダンベルを持ち上げて、その「筋肉」の質感を再現できる人を見たことがありますか? 最近、ポーランドのエンジニアが次のようなものを作りました。 ほら、ダンベルが簡単に持ち上げられます。 このプロセスの間、腕の「筋肉」は運動に応じて変化します。 その後の指を曲げる動作では、これらの「筋肉」の変化がより顕著になります。 異なる指を曲げると、腕の異なる「筋肉」に影響を及ぼすことは、写真から容易にわかります。 手のひらを左右に回すと、次のようになります。 拳の表示もあります: その結果、このような生きているようなロボットアームはネットユーザーの間で多くの議論を巻き起こし、中には次のように言う人もいました。
重さはわずか1kgで水で動きますこのロボットアームは 7kg のダンベルを持ち上げることができますが、実際の重量はわずか1kgです。 作者によれば、水の力だけで自身の7倍の重さの物体を持ち上げることができ、ピーク時の消費電力は200Wだという。 (ちょっと血の匂いがする…) しかし、著者らは油圧システムに加えて、急速な収縮を完全に制御できるポータブル電源とバルブも発明した。 ソフトウェア的には、ロボットアームの動作シーケンスは簡単なコマンドプログラミングによって実現されます。 しかし、このロボットアームは、人間と同じように機能する人工筋肉の半分しか備えていないため、完璧ではありません。 さらに、指を曲げる動作を行う際に、特定の筋肉がまだ機能していません。 指が左右に動いたり、中手骨や手首の関節の動きが妨げられたりすることもあります。 たとえば、ビデオでは、このロボット アームでダンベルを水平に持ち上げる場合、やはり人間の助けが必要です。 ネットユーザー:言語に絶するようなことをすると思いますか?まだいくつか欠陥はありますが、これはプロジェクトの始まりに過ぎません。 将来的には、人間の家政婦、掃除人、運転手などとして機能できる完全なヒューマノイドロボットを開発したいと考えています。 しかし... ネットユーザーが驚く一方で、一部は話題から外れ始めた。 「ビッグバン・セオリー」のハワードを思い出します... |
<<: 勾配降下法からアダムまで! 1つの記事でさまざまなニューラルネットワーク最適化アルゴリズムを理解する

推薦する
自然言語処理における大きな前進: Word2Vec モデルを適用して単語ベクトル表現を学習する
一般的な自然言語処理システムでは、単語のエンコードは任意であるため、個々の記号間の可能な関係に関する...
9 つの SOTA GNN よりも強力です。 Google Brainが新しいグラフニューラルネットワークGKATを提案
[[413820]]グラフは、ソーシャル ネットワークからバイオインフォマティクス、ロボット工学の...
フェイフェイ・リーがリストに載っています!バイデン氏、AI研究者にデータを公開するため12人からなるタスクフォースを設置
バイデン政権は木曜日、国家人工知能研究リソース(NAIRR)作業部会の設立を発表した。ワーキンググル...
中国AIGC広告・マーケティング業界パノラマレポート:5つの大きな変化と4つの大きな影響、生成AIにより「1人」のための広告作成が可能に
インターネット トラフィックの配当が薄れるにつれ、広告およびマーケティング業界は既存の市場シェアをめ...
TikTok買収事件、主要アルゴリズムが焦点に 英国メディア:買収候補は4つの選択肢を提示
ロイター通信が2日報じたところによると、TikTokの買収候補らは、主要アルゴリズムを伴わない買収を...
中国科学院、2019年の世界人工知能の発展を総合的に総括:8つの主要技術が登場し、AIはより多くの分野に浸透
この記事はLeiphone.comから転載したものです。転載する場合は、Leiphone.com公式...
「CNNの父」ヤン・ルカン氏:人工知能には脳がなく、そのIQは犬ほど高くない
ビッグデータダイジェスト制作ディープラーニングの三大巨頭の一人として知られるヤン・ルカン氏は、常に楽...
人工知能をゼロから学ぶのは難しくない
「人工知能」という用語は、1956年にダートマス協会で初めて提案されました。それ以来、研究者は多くの...