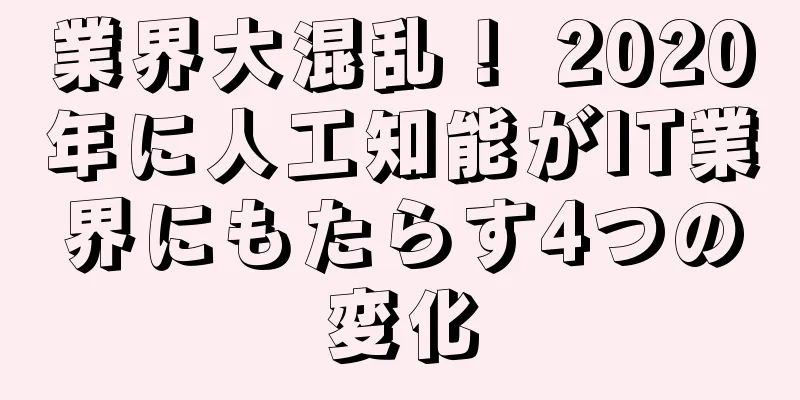
梅の花の山の上を歩くロボット犬?自転車は自分でバランスをとることができますか?テンセント・ロボティクスXラボ研究初の「開封」
|
テンセントは11月20日、移動ロボット研究における新たな進展を発表し、四足移動ロボット「ジャモカ」と自立バランス型車輪移動ロボットを初めて一般公開した。 Jamocaは、梅の棒の上を歩くという複雑な課題を達成できる中国初の四足歩行ロボットであり、自律バランス型車輪移動ロボットの関連研究成果もロボット産業のトップカンファレンスであるIROS 2020に選ばれました。 これら 2 つの進歩は、Tencent Robotics X Lab から生まれたものです。これらはモビリティ分野における技術的なブレークスルーであり、ロボットの最も基本的な機能の 1 つでもあります。 Tencent Robotics X Labは、人間と機械の協働のための次世代ロボットの研究を推進し、仮想世界から現実世界へのキャリアとコネクターを構築することを目的として2018年に設立されました。現在、当研究室は、移動性、器用な操作性、インテリジェントエージェントという3つの一般的なロボット技術の研究と応用に注力しており、マルチモーダル移動ロボットの開発に注力しています。 四足歩行ロボット「ジャモカ」は、歩く、走る、ジャンプすることができ、梅の花の山のような複雑な地形にも対応できる。 「何十年もの間、少林寺の師匠のもとで学び、梅の花の山の上で本物のカンフーを練習する。決意を持って練習を続ければ、必ず有名になり、すべての英雄を超えることができるだろう。」 梅花杭は中国カンフーの重要な訓練道具の一つです。武術小説では梅花杭の練習は気功の練習の基礎にもなっています。現在、梅の花の山に新たな「実践者」、テンセントの四足移動ロボット「ジャモカ」が加わった。 Jamoca は外部ハードウェア プラットフォームに基づいて改造されており、重量は約 70 kg、長さ 1 メートル、幅 0.5 メートル、高さ 0.75 メートルです。 四足歩行移動ロボット。通称ロボット犬。 Tencent Robotics X Labは、外部ロボット本体と独自のロボット制御技術に基づいて、複雑な環境に対応できるJamoca用のインテリジェントな頭脳を構築しました。この脳のおかげで、ジャモカは歩く、早足で走る、ジャンプするといったことができ、自律的に障害物を見つけて避ける能力も得られます。 今回ジャモカさんがクリアしたチャレンジは、高さ60センチ、傾斜20度の階段と、隣り合う山との最大高低差が16センチで間隔が不等間隔の梅の花山の2つから構成されていました。 テンセント・ロボティクスXラボの研究者によると、木片の上を歩く他の四足歩行ロボットに比べ、ジャモカが今回挑戦する梅の花の山は足場が小さく、高さも高く、段差も複数あるため、達成がより困難だという。 ロボットの移動性をテストする上で、主な難しさは 2 つあります。梅の山の配置 (位置と高さを含む) を理解すること、最適な着地地点とルートを選択すること、そして安定して正確に歩くこと (梅の山の中央に着地すること) です。 これは、研究所がモバイル技術で研究している 2 つのコア技術モジュール (認識、動作計画、制御) に対応しており、同時に、これら 2 つは研究所の別のコア技術モジュール (システム全体の設計と構築) を通じて体系的に統合されています。 Jamoca Challengeの結果から判断すると、Tencent Robotics X Labは、誤差1cm未満の認識と位置決め、環境に基づいた10ミリ秒のルート計画、ダイナミクスに基づく1KHzのリアルタイムトルク制御、梅の花の山の中心での着陸誤差1cm未満、システム全体の高度な調整など、非常に高い技術基準を達成しました。 正確な環境認識の点では、Jamoca は堅牢な目と足のキャリブレーションを革新的に実装し、RGB-D カメラを使用して周囲の環境をリアルタイムで認識します。 Jamoca 自身の動作軌跡は特徴点のマッチングによってオンラインで追跡され、ビジョンベースの位置情報は運動学ベースの走行距離計情報および IMU (慣性計測装置) データと融合され、位置決めと追跡の精度と頻度が向上します。同時に、アルゴリズムを使用して階段と梅の花の山の表面積と中心点の位置を識別して抽出し、位置決めデータと識別データを融合して、3次元の動作シーン全体を再構築します。 最適な動作ルート計画とリアルタイム動作制御の面では、Jamoca は、重心ダイナミクスと、知覚システムによって知覚されたロボット本体と梅の花の山のリアルタイム位置情報に基づいて、オンラインでの重心軌道生成と着地点計画を実現します。ロボットの4本の足が安全に梅の山の次のステップに踏み出せることを保証しながら、体の移動距離が最短で全体のエネルギー消費量が最小となる動作軌道を最適化し、上記の動作計画をオンラインで継続的に実行できます。 同時に、リアルタイムの固有受容状態推定に基づいて、Jamoca は質量中心動力学モデルを組み合わせて最適化問題を構築し、ロボットの足に必要な地面反力をリアルタイムで解決し、フィードバック制御を組み合わせて正確で堅牢なリアルタイムの力制御を実現し、歩行、斜め速歩、ジャンプなどの動作制御を完了できます。 事前に設計されたルールに基づいて反復動作を実行する産業用ロボットとは異なり、Robotics X ラボは、意識と判断力を備えたロボットの自律特性の研究に重点を置いています。目標は、不確実性が非常に高い動的環境において、ロボットが自律的に判断、決定し、タスクを自律的に完了できるようにすることです。 現在、Jamoca は主に研究室内での科学研究実験に使用されています。オンライン環境認識、最適な動作計画、リアルタイム動作制御などの機能は、テンセントの他のロボット製品が将来、複雑な現実世界の環境に適応するのに役立つだろう。 静止時と移動時の両方で自律的にバランスを維持できる車輪付きロボット また、今回公開されたのは、テンセント・ロボティクス・X・ラボ初の自社開発ロボットである、セルフバランス自転車とも呼ばれるセルフバランス車輪移動ロボットだ。 従来の車輪付き移動ロボットをベースに、運動量ホイールとモーター駆動システムを追加し、ロボットが静止時と移動時の両方でバランスを維持できるようにします。 自立バランス型車輪移動ロボットのハードウェアプラットフォームは、Tencent Robotics Xによって完全に開発されました。重量は約15キログラム、長さは1.15メートル、高さは0.52メートルです。 その制御能力は、移動中の動的自己バランスと停止時の静的自己バランスにさらに分けられます。走行中の動的セルフバランスは、フロントハンドルを回転させて車体の回転を駆動することで実現され、停止時の静的セルフバランスは、運動量ホイールトルクバランス技術を使用し、角運動量保存の原理を適用してセルフバランス制御を実現します。 バランス調整アルゴリズムを利用することで、たとえ外部からの干渉を受けても、テンセントの自立バランス型車輪移動ロボットは自立バランス状態を維持しながらスムーズに前進することができます。 このロボットは、上り坂や下り坂など、さまざまな道路状況でも優れた機動性とバランス性能を発揮しました。一枚板の橋を走行するなど、走行経路に特定の制約がある状況にも対応できます。 ロボット業界の最高峰の国際会議であるIROS 2020では、Tencent Robotics X Labが発表したバランス制御に関する2つの口頭発表がこのロボットプロジェクトから生まれました。 IROSはIEEE(米国電気電子学会)とRSJ(日本ロボット学会)が共同で主催するロボット分野の3大国際会議の一つです。今年のテーマは「コンシューマロボットと私たちの未来」です。ロボットと人工知能、ロボットビジョン、センサー、クラウドロボットなど、関連分野からの研究発表を受け付けています。 最初の研究「自立型車輪移動ロボットの非線形バランス制御:設計と実験」では、Tencent Robotics X Labとニューヨーク大学が協力して、自立型車輪移動ロボットの動的および静的バランス制御の安定性を研究しました。 Tencent Robotics X Labは、従来の車輪式移動ロボットをベースに、運動量車輪とモーター駆動システムを追加し、カスケードとダンピング構成の受動制御法(相互接続とダンピング割り当て - 受動性ベース制御、IDA-PBC)を使用し、リャプノフ理論を応用して、自立バランス型車輪式移動ロボットの閉ループシステムの安定性を理論的に証明しました。 さらに、研究室は独自のプラットフォーム上で、新しいコントローラーがうまく機能し、ロボットが自己バランスを維持し、外部干渉に抵抗する一定の能力を持つことを実証しました。 別の研究「自立バランス型車輪移動ロボットのバランスゲイン計画コントローラの設計」では、静的バランスと動的バランスを区別する従来の方法とは異なり、研究チームは車輪移動ロボットの動的特性と静的特性を同時に記述できる統一された数学モデルを確立しました。 同じモデルに基づいて、動的バランスと静的バランスは、異なる駆動入力に対する依存度が異なり、同じ制御パラメータを使用することはできません。そこで研究チームはゲインスケジューリングに基づく制御方法を採用しました。この制御方法は、両方の状況で車輪付きロボットのバランスを維持できることが理論的にも実験的にも実証されています。 移動ロボットの技術的枠組み Tencent Robotics X Lab は、ロボットの移動、器用な操作、インテリジェントエージェントという 3 つのコア一般技術の研究と応用に重点を置いています。 その中で、移動はロボットの最も基本的な能力の一つであり、今回発表された二つの進歩は移動の方向に属するものである。 モバイルディレクションは、機械設計、知覚、動作計画と制御、システム全体の設計と構築という 4 つの技術モジュールに分けられます。簡単に言えば、最初の 3 つはロボットの胴体、目、脳であり、最後の 1 つはさまざまな「器官」の連携能力です。 自社開発のアルゴリズム「Jamoca」は、テンセントの知覚と動作計画および制御の研究成果を組み合わせたものです。自社開発の自立型バランス車輪移動ロボットは、ロボットの機械設計と全体的なシステム設計・構築能力の面で、テンセントにとって画期的なプロジェクトと言える。 Tencent Robotics XおよびTencent AI Labのディレクターである張正友博士は、次のように述べています。「移動性や動作は、ロボットの最も中核的かつ基本的な機能の1つであり、ロボットがどこへ行けるか、何ができるか、将来どのような想像力を持つかを決定します。私たちは、この2つの進歩を非常に嬉しく思っており、仮想世界から現実世界への強力な架け橋を築くために、ロボットの一般的な機能を深く探求し続けます。」 |
>>: アルゴリズム エンジニアはなぜ一日中データを扱うのでしょうか。また、どのような種類のデータを扱うのでしょうか。


推薦する
米メディア:なぜソフトロボットは科学者を魅了するのか?
[[374766]]米フォーチュン誌のウェブサイトは1月1日、「なぜ『ソフトロボット』はNASAや...
人工知能が従業員の定着率向上の秘訣を明らかにする
従業員の定着は、長年にわたり企業経営者にとって深刻な問題となってきました。雇用の安定と従業員の忠誠心...
30分で独自のディープラーニングサーバーを作成する
新しいプロジェクトを始めるたびに、私はディープラーニング マシンを何度も何度も作成していることに気づ...
中国の良き叔父から12歳の開発者Jing Kunまで:DuerOSはすべての開発者に平等に力を与えます
スマート音声開発者はAIの「ゴールドラッシュ」を先導しています。 7月4日、第2回百度AI開発者会議...
ビッグデータアルゴリズムとアプリケーションシナリオパート1: 統計と分布
アルゴリズムはビッグデータの最も価値のある部分です。ビッグデータマイニングとは、大量、不完全、ノイズ...
Baidu が DeepVoice の最終バージョンをリリース: 10,000 人の声を真似て 30 分でアクセントを習得
今年初め、検索大手の百度は、人気のディープラーニング技術を使用してテキスト読み上げ(TTS)変換を実...
IBMは機械学習に大きな飛躍をもたらす量子アルゴリズムを開発したと主張している
IBMの研究者らは、量子コンピューター上で高度な機械学習を可能にする新しい量子アルゴリズムを開発した...
Kubernetes にディープラーニング モデルをデプロイする方法
Kubermatic Kubernetes プラットフォームを使用して、画像認識予測用のディープラー...
機械学習開発者が知っておくべき 5 つのディープラーニング フレームワーク
ディープラーニングには大量の計算が必要です。通常、多数のノードを持つニューラル ネットワークで構成さ...
2020年代に人工知能が教育を変える6つの方法
自動駐車システム、モバイル決済、ソーシャル メディア フィード、あるいは私たちが毎日触れる無数のテク...
人工知能は法曹界に新たな形を与えています。法務テクノロジー企業はどのようにしてクライアントにグローバルなサービスを提供できるのでしょうか?
法務テクノロジーには、弁護士とそのサポートスタッフが顧客に法務サービスを提供するのに役立つソフトウェ...
Google の FLoC アルゴリズムは、プライバシー保護の向上か、広告テクノロジーの向上か?
Android システムでは、Nut Hidden APP をダウンロードして、セキュリティリスク...