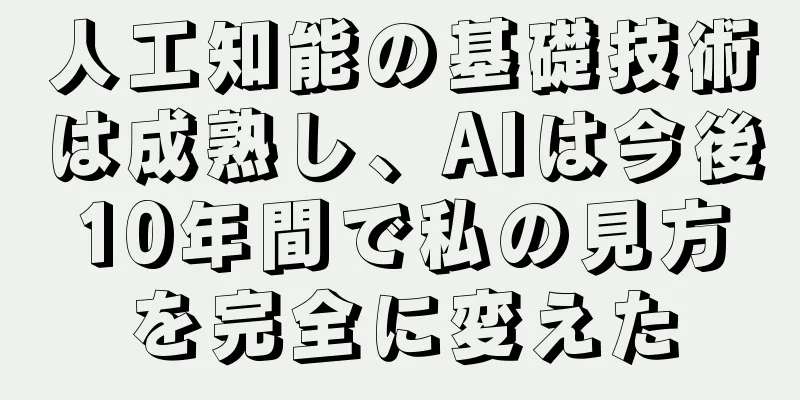
水中ロボットが極地でその能力を披露
|
水中ロボットが極地でその能力を披露 科学研究員らが甲板上で展開準備を進めている。
自律型水中ロボット「Exploration 4500」は回収作業中。 中国の第12次北極科学探検隊は、14,000海里を79日間の風と波に耐えながら航海し、無事に任務を完了した。数日前、「雪龍2号」調査船がゆっくりと上海国内基地ターミナルに停泊するにつれ、探検隊員の邵剛さんの緊張した神経は徐々にほぐれていった。 この科学調査航海において、彼と3人の同僚が担当した自律型水中ロボット「Exploration 4500」(以下、「Exploration 4500」)は優れた性能を発揮し、北極の高緯度海氷域での科学調査作業を無事に完了しました。また、我が国が自律型水中ロボットを使用して高緯度北極圏の海底付近の科学調査を行うのは今回が初めてです。今回の潜水の成功により得られた貴重なデータは、北極の環境保護に重要な科学的支援を提供するものとなります。 北極への最初の航海中に一連の技術的アップグレードが実施された邵剛氏は中国科学院瀋陽自動化研究所の准研究員。極地科学探検に参加するのは今回が初めて。彼と同様に、エクスプロレーション4500も初の極地探検を行っている。 瀋陽自動化研究所が開発した「Exploration 4500」は、「大きな黄色いニベ」のような姿をしている。 「Exploration 4500」は、通常の無人水中ロボットと比較して、より強力な自律機能を備えています。 瀋陽自動化研究所の准研究員、リー・ヤン氏は記者団に対し、「遠隔操作の水中ロボットと比べ、『探査4500』は母船とケーブルがつながっておらず、人間の介入なしに自律航行と探知が可能である。耐久力も長く、作業範囲も広い」と語った。 「エクスプロレーション4500」は十分なパワーを備えているが、研究者たちはまだ過酷な極地環境に踏み込むことに自信を持てていない。出発前に一連の技術的なアップグレードと変更を実施し、システムの信頼性を総合的に向上させました。 高緯度の極地では、科学調査母船が風や海流などの影響を受けて移動し、比較的一定の範囲内で水中ロボットを展開・回収することが困難になります。また、氷により母船と水中ロボットの通信が妨げられます。 「これらすべてには、水中ロボットが自律誘導機能を持ち、母船からの指示を正確に受信し、自身の装備の状態に応じて動作軌道を調整し、回収プロセス中に徐々に母船に近づき、それによって自動かつ安全な回収を実現できることが求められます」と邵剛氏は紹介した。 北極科学研究作業エリアの海氷密度の高さを考慮して、研究チームは音響遠隔操作と自動誘導を組み合わせた氷下回収技術を革新的に開発し、「Exploration 4500」の連続潜水の成功と安全な回収を確保しました。邵剛氏は「潜水艇が浮上後に氷の下に閉じ込められたり、肉眼で位置が判断できない場合に、より正確な方向測位ができるよう、緊急ビーコンも追加した」と述べた。 さらに、科学研究チームは「探査4500」の障害処理プロセスを最適化し、探査4500が自ら現状を判断して意思決定を行えるようにした。 「ロボットは一定期間作業を続けると、人間のように自分の体調を感知できるようになる」とシャオ・ガン氏は言う。「機嫌が良いと感じたら作業を続けます。機嫌が悪いと感じたら、すぐに救難信号を送ってくれるので、私たちはすぐに助けてあげます」 過酷な極地環境でも安全に回収できることがテスト済み十分な準備を整えていたにもかかわらず、極地の天候は急速に変化し、科学探検隊のメンバーと「Exploration 4500」は北極で予想外の困難と試練に直面しました。 作戦開始前、潜水予定エリアの気温は急激に下がり、風と雪が降り、視界も非常に悪かった。 「当時、私たちの母船は作業海域から10海里以上離れていました。航海中は非常に緊張し、機器の展開を正常に完了できるかどうか心配していました」とシャオ・ガンさんは回想する。 母船が潜水エリアに到着すると、天候は回復し始めたが、その前の気温の低下と吹雪により海面は急速に凍結し、水域の面積は以前よりも大幅に狭くなっていたため、ロボットの展開と回収に大きな困難とリスクが加わった。 ロボットには足を置く場所がなく、科学調査ミッションは時間に敏感で遅らせることはできません。どうすればよいでしょうか?最終的に、シャオ・ガン氏とその同僚は、母船を使って氷を砕き、水中ロボットを配備できる水環境を人工的に作り出すことを決定した。邵剛氏は「氷を砕いて開けた水域は非常に狭く、実は水中ロボットの回収には不向きだった。幸い、最終的には展開と安全な回収を完了し、『Exploration 4500』が過酷な極地環境で科学研究の応用を行える能力があることも証明された」と語った。 極地の海洋の多くの地域は一年中海氷に覆われており、海氷と氷の下の水の特性を調査することは極地探検の重要な部分です。瀋陽自動化研究所の李碩副所長は、極地科学研究は常に水中ロボット開発の重要な方向であったと紹介した。近年、瀋陽自動化研究所は4種類の無人水中ロボット6組を8回の極地科学探検に参加させ、我が国の極地科学探検に重要な貢献を果たしました。 「自律型水中ロボットは極地科学研究において主に3つの任務を担っている」とリー・ヤン氏は言う。「1つ目は浮氷を観察・検出し、その厚さ、状態、動きを把握すること。2つ目は水深、温度、塩分濃度などの水パラメータを測定すること。3つ目は海底地形の詳細な検出を行い、それに基づいて海底の鉱物資源を発見することだ。」 海氷調査の従来の方法は、海氷に穴を開けることです。この方法は比較的効率が悪く、得られるデータも限られており、大きな制限があります。自律型水中ロボットは海氷の影響を受けず、一部の人間が到達できない地域に到達できるため、より広い地域、より深い場所で、より長い期間にわたって科学調査を実施できます。さらに、サンプリングは柔軟かつ正確であるため、収集されたサンプルの品質が向上し、収集されるサンプルの数が増えます。 「科学研究者は、水中ロボットに搭載されたビデオカメラ、静止画カメラ、画像ソナーなどの画像機器を使用して、極地の水中世界を視覚的に観察することができます」とリー・ヤン氏は語った。 李碩氏は次のように述べた。「北極の科学探検に自律型水中ロボットを応用することで、科学者のインテリジェントロボット技術に対するニーズをより深く理解できるようになりました。研究チームはこれを出発点として、技術革新と科学ニーズを密接に結び付け、継続的に最適化とアップグレードを行い、将来、北極の科学探検でより大規模な探査活動を行うためのよりインテリジェントな技術手段を提供し、科学者がより価値のあるデータと情報を入手できるように支援します。」 表面から水深11,000メートルまでをカバーする高度な機能1970年代初頭から、一部の国では極地探検用の無人水中ロボットの開発が始まっていました。現在では、主に遠隔操作型(ケーブル付き)と自律型(ケーブルなし)など、さまざまなタイプがあります。 李楊氏は、わが国では1980年代に水中ロボットの開発が始まり、当時の主な研究開発部門の一つが瀋陽自動化研究所であったことを紹介した。 「しかし、極地科学研究用水中ロボットの急速な発展は、主に過去10年間に起こった。この間、私たちは『海機豪ROV』『北極ARV』『探査AUV』などの水中ロボットを次々と開発し、多くの極地科学探検に参加し、それらはすべて成功裏に応用されてきた。」 近年、国家の大きなニーズに応えて、瀋陽自動化研究所は水中ロボットの体系的な開発を推進することに力を注いでおり、現在では水面から水深11,000メートルまでの完全カバーを実現し、距離も数キロから数千キロまでの完全カバーを実現しています。 「私たちのチームは主に無人水中ロボットの研究開発と応用に注力しています。現在、我が国の無人水中ロボットは主要機能と性能指標の面で国際的に先進的なレベルに達しています」と李楊氏は述べた。 水中ロボットの発展に伴い、その応用分野はますます広範囲に広がり、水中ロボットが直面する動作環境はますます過酷かつ複雑になっています。李楊氏は記者団に対し、極地に加え、青海・チベット高原の高原湖沼と太平洋のマリアナ海溝でも現在科学調査を続けていると語った。 「これらは非常に過酷かつ複雑な環境であり、無人水中ロボットの自律制御技術に高い要求が課せられます。限られたスペースにさらに多くのセンサーを搭載する必要があり、全体的なレイアウトとバッテリーの互換性に大きな課題が生じます。」 今後、世界の自律型水中ロボットの開発は、環境適応性と協調操作能力を強化し、よりインテリジェントな方向へと進むでしょう。 「当社の初期の自律型水中ロボットのほとんどは、事前にプログラムされていました。水中に投入される前に、研究者はすでにロボットにプログラムを設定して、目標と進むべき道筋を伝えていました。」李楊氏は、将来、知能が発達するにつれて、人間の介入はますます少なくなり、自律型水中ロボットはより賢くなり、より大きな役割を果たすようになるだろうと語った。 |
<<: 今後5年間で人気が高まり、就職時の給与も高くなる3つの専攻
>>: ケンブリッジ大学チームは約50年後に初めて量子スピン液体を検出し、その研究はサイエンス誌に掲載された。
推薦する
AIの終末: 人間は本当の自己認識を持っていない
この記事は公開アカウント「Reading Core Technique」(ID: AI_Discov...
2023年の7つの主要なAI技術トレンド
人工知能は現在世界を席巻しており、サプライチェーンの完全な自動化、仮想アシスタンスの提供などにより、...
AIがネットワークゴミを生み出す:古いインターネットは死につつあり、新しいインターネットは困難の中で生まれる
網易科技は6月27日、ここ数カ月、インターネットの方向性が変化したことを示すさまざまな兆候があると報...
研究者らは、キーボードの打鍵音からデータを盗むためのディープラーニングモデルを最大95%の精度で訓練することに成功した。
8月7日のニュース、キーボードで入力した内容が他人に聞かれる可能性があることをご存知ですか?英国の...
顔認証+総合決済、モバイル決済が新たな形を生む
モバイル決済は今や人々の生活の一部となり、人々に迅速で便利なショッピング体験をもたらしています。現在...
AIは「技術力」の集中を加速させる。巨大企業によるAIの独占は深刻な結果をもたらすのか?
AI テクノロジーがかなり集中化しており、テクノロジー大手が優位に立っていることにお気づきですか?...
Python+AI で古い写真をカラー化
こんにちは、みんな。今日も引き続き、興味深い AI プロジェクトを皆さんと共有したいと思います。前回...
ニューロモルフィックコンピューティングを理解する: 基本原理から実験的検証まで
人間の脳は、効率的な生体エネルギーによって計算能力を部分的にサポートし、ニューロンを基本的な発火単位...
アルゴリズム: 2つの順序付きリンクリストをマージする
[[414979]]この記事はWeChatの公開アカウント「3分でフロントエンドを学ぶ」から転載した...
RLHF は万能薬ではありません! MIT、ハーバード大学などの32人の研究チームが、250本以上の論文を網羅し、大規模モデルの仕組みに疑問を投げかけ、最大の弱点を明らかにした。
現在、GPT-4 であれ、Llama 2 などの大規模言語モデルであれ、その背後にあるメカニズムは人...
Java 開発者のための機械学習の事例
翻訳者 |陳俊レビュー | Chonglou昨年以来、 ChatGPTやBardなどの大規模言語モデ...
タオバオライブストリーミングにおける機械学習に基づく帯域幅推定の探求と実践
背景メディア伝送における一般的な帯域幅推定アルゴリズムには、GCC/BBR/PCC/QUBIC など...
ChatGPT の最強の代替手段が無料に別れを告げます!クロード会員版は月額140円で会話量が5倍に増える
ChatGPT の最強の代替手段が、純粋な無料に別れを告げる——皆さん、Claude には有料版もあ...