
この「水中トランスフォーマー」はNASAによって困難な水中作業のためにテストされている。
|
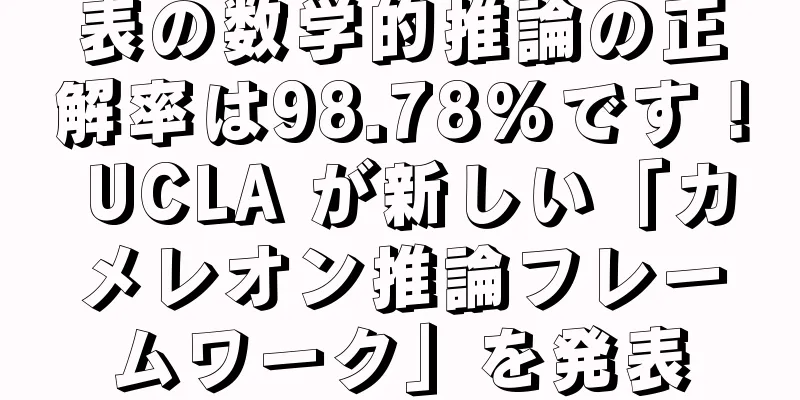
▲写真:アクアノートロボットがNASAの中立実験室で水中浮遊テストを受けている。 私のすぐ近くで、2人の宇宙飛行士が宇宙遊泳の練習をしていました。私の耳に届くのは、自分の呼吸と、ヘッドホンから聞こえる管制センターからの放送だけ。あとは静寂と無重力の世界でした。しかし、ここは暗い空間ではなく、ヒューストン宇宙センターにある巨大で深いプールです。 NASA はこの環境を利用して、宇宙飛行士が無重力環境に適応できるように訓練します。宇宙飛行士の訓練セッションを見るのは確かに面白かったが、私には自分の使命があった。プールでテストされている明るいオレンジ色のロボット、アクアノートをじっと見つめていたのだ。 アクアノートは小型潜水艦のように水中を滑らかに滑走します。一見すると、他の無人水中車両(UUV)と何ら変わらないように見えます。このような装置には、データを収集するためのセンサーと移動用のスラスターが装備されています。しかし、アクアノートはもっと先進的だ。映画「トランスフォーマー」の登場人物のように、船体上部から側面まで2本の巨大なロボットアームを伸ばすことができる。センサーが満載のくさび形のヘッドが絶えず回転し、ロボットアームを誘導して数秒以内に変形を完了する。今では、丸みを帯びたラインの潜水艦は半人型の機械となり、作業を開始する準備ができています。 アクアノートは、ヒューストン・メカトロニクス(HMI)という新興企業が海中ロボットに革命を起こすことを期待している、革新的な新設計の製品です。従来の UUV は、一般的に、遠隔調査ミッションに使用される魚雷のようなフリーダイバーと、支援船と連携して水中で操縦できる箱型の遠隔操作マシンの 2 つのカテゴリに分類されます。 HMI は、これら 2 つのモードを組み合わせて変形ロボットを作成したいと考えています。これはこれまで誰も挑戦したことのない大胆なアイデアです。 HMI エンジニアはよく、トランスフォーマーの構築が生涯の目標の 1 つであると冗談を言いますが、彼らはそれが実現可能であると固く信じています。 Aquanaut は主に海底の石油・ガス設備の修理に使用されます。この種のインフラを所有・運営する企業は、従来、施設の検査と保守に多額の資金を投資する必要がありました。しかし、このプロセス全体は、何十年もほとんど変わっていないロボット技術に依存しています。結局のところ、このような過酷な環境に対応できるのはロボットだけです。 HMI にとってはそれは問題ではない。同社の 75 人の従業員のうち 24 人以上が NASA で働いた経験があるからだ。したがって、極限環境への対処はまさに彼らの得意分野です。 HMI の共同創設者兼 CTO である Nic Radford は、ヒューストンにある NASA のジョンソン宇宙センターで 14 年間勤務し、高度なロボット プロジェクトの推進に貢献しました。同氏は、「宇宙に入ることは、水中に入ることより間違いなく難しい。しかし、宇宙環境は比較的単純であるのに対し、水中環境は非常に動的である。確実ではないが、ロボットが水中で作業する場合、その難しさは宇宙環境の10倍、あるいは50倍になるのではないかと私は当初から考えている」と語った。 アクアノートは、長距離航行用に設計された機敏な潜水艦から、複雑な運用タスクを実行できる半人型ロボットに素早く変形できる、ユニークな無人水中車両です。具体的な変形プロセスは以下のとおりです。 1. アクアノートは潜水艦モードで海底の作業場へ移動します。 2. 現場に到着すると、ロボットの船体上部が上昇し、2 本の巨大なロボット アームとくさび形のヘッド デバイスが現れます。 3. ステレオカメラ、3Dセンサー、ソナーシステムを搭載したヘッドが回転して所定の位置に移動します。 4. 次に、ロボットは力センサーと爪グリッパーを備えた強力なロボットアームを展開します。 2014年にHMIを設立して以来、ラドフォード氏と共同設立者のマット・オンドラー氏、レグ・ベルカ氏はベンチャーキャピタルから2,300万ドル以上を調達した。数え切れないほどの設計の繰り返しを経て、ついにアクアノートが完成しました。しかし、海に向かう前に、ロボットはまずNASAのタンク内で、より管理された実験室環境でその性能を実証する必要があった。 NASA の中性浮力実験室 (NBL) には 2,350 万リットルの水が収容され、最大深度は 12 メートルです。これは、国際宇宙ステーションのコンポーネントのほとんどの完全な模型を余裕を持って収容できるほどの広さです。宇宙飛行士はNBLでほぼ無重力状態での宇宙遊泳を体験することができます。今年3月下旬の今朝、HMIは予定通り施設の北側に到着し、アクアノートのテストを開始しました。 深さ10メートルで、私は高炭酸塩タンクを2つ運び、水中でのロボットの動きをできるだけ安定して追跡しました。アクアノート号はここに来てまだ8日しか経っていませんが、テストはすべて順調に進みました。唯一の小さな問題は、ロボットアームのリモート操作が時々失敗するということですが、HMI チームはこれについて心配していません。彼らは、まだやるべき仕事がたくさんあり、ロボットが朝に彼らのためにここに来るだろうとわかっています。 ラドフォード氏は、NASAのような大規模な政府機関の計画的な運営とは対照的なペースでスタートアップを経営する興奮を楽しんだと語った。 HMI に入社する前は、NASA の Robonaut プロジェクトの主任エンジニアとして 5 年間勤務し、国際宇宙ステーション用のヒューマノイド ロボットを開発しました。その後、より複雑なヒューマノイド ロボット プラットフォームである Valkyrie の開発を主導しました。 HMI 氏の個人オフィスには、アクアノートのプロトタイプ設計の小さな 3D プリント モデルがあり、壁にはヴァルキリーやマーベルのアイアンマンのグラフィティ画像が描かれています。 「NASAで開発している技術は、主にロボットを遠隔地に配置し、厳しい環境で有用な仕事をさせることですが、海洋のニーズによく合っています」と彼は語った。 私たちが耳にしたり見たりした沖合の石油・ガス採掘のほとんどは、沖合プラットフォームを通じて完了します。ここから水中掘削作業が行われます。プラットフォームは作業の中で最も目立つ部分ですが、海底には大量の複雑なインフラストラクチャも配備されています。 炭化水素を地表に導くために、海底の坑口に金属製のキャップが設置されます。この複雑な構造には、パイプ、バルブ、マニホールド、多数の器具が含まれており、多くの実践者は冗談でこれを「クリスマス ツリー」と呼んでいます。井戸の中には4階建ての建物と同じくらいの高さのものもあります。 ▲写真は水上ロボット。潜水艦モードでは、アクアナットは海底に配備された石油およびガス設備の調査と検査を行うことができます。ヒューマノイドモードでは、ロボットは腕を使って特殊なツールをつかみ、地表への炭化水素の流れを制御するバルブを操作することができます。 坑口の定期メンテナンスを実行したり、生産量の流出量を変更したりするには、「ツリー」の特定のバルブをオンにする必要があります。しかし、井戸は海の深いところにあることが多く、時には300メートル以上の深さにあるため、ダイバーは通常そこに到達することができず、唯一の方法はロボット車両を使用することです。 数十年にわたり、深海の井戸で作業する際の通常の手順は、遠隔操作型水中探査機 (ROV) を井戸の現場に送ることでした。しかし、ROVの活動拠点となる、経験豊富な人員を満載した大型支援船がなければ、ROVを単独で派遣することは不可能でした。これまでのROVは自律機能がほとんどまたは全くなく、海面からのコマンドと制御しか受け付けられませんでした。これにより、機器の運用コストが大幅に増加することは間違いありません。また、一般的なワークフローでは、1 日あたり数万ドルから数十万ドルの費用が発生します。 HMI 企業は、従来の方法の欠点を排除したいと考えています。アクアノートロボットは、テザーや支援船を必要としません。潜水艦モードで深海の目的地まで移動し、そこで人型に変形し、強力なロボットアームを使って任務を遂行します。各ロボットアームにはトルクセンサーが装備されており、8 つの動作軸を備えており、人間の腕と同様の動作機能を実現します。アクアノートのロボットアームは、海底バルブのクランプを回転させたり、内部のペイロードベイに搭載された特殊なメンテナンスツールにアクセスしたりすることもできます。 アクアノートは、人間のオペレーターがその動作を直接制御するのではなく、監視しながら自律的にタスクを実行できます。作業が完了すると、ロボットは自動的に基地に戻ることもできます。ラドフロッド氏は、このアプローチにより、アクアノートは既存のROVよりも迅速かつ低い運用コストで展開できると述べた。彼は、コストは従来のソリューションの半分程度になる可能性があると見積もっています。 このロボットの発売のタイミングはちょうど良いです。現在ワシントンDCのオフショア技術協会のROV委員会の委員長を務める海中技術の先駆者、チャック・リチャーズ氏によると、ここ数年の原油価格の低下により利益が減少し、石油会社間の競争が激化しているという。これは、新しい技術を習得した者が、激しい対決の中で生き残ることができることを意味します。リチャーズ氏が設立したヒューストンを拠点とする会社、リチャーズ&アソシエイツは、HMI を含む機器を数十社の海中メンテナンス会社に提供しています。彼は、業界はアクアノートのような革新に対して慎重な傾向があるが、それでもこの新しいロボットの能力を見るのはワクワクすると説明した。 リチャーズ氏は、1970年代に商用ROV技術が開発されたことで、業界に急速に導入されるようになったと説明した。また、スタート当初は関連商品も比較的粗雑なものでした。 「しかしROV業界が進歩するにつれ、石油会社は大きな忍耐と肯定的な姿勢を示しました。彼らがより高度な自動化を備えた新しい乗り物を拒否する理由は見当たりませんでした」と彼は回想する。
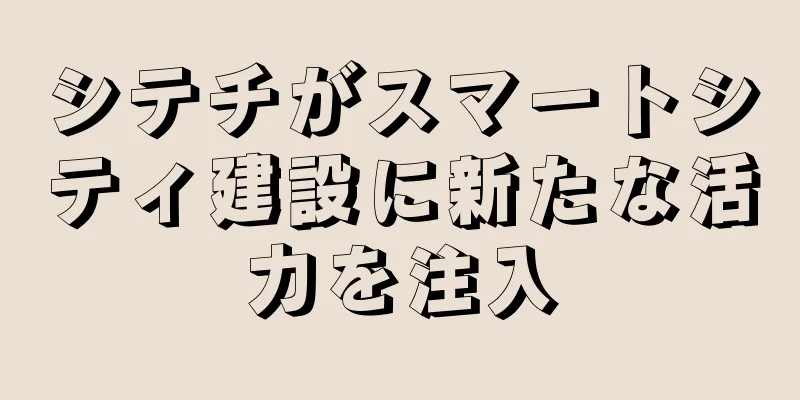
▲ 写真はスマート潜水艦です。HMI のエンジニアが、ロボットの水中テストに備えてアクアノートのヘッド (ロボットのすべての主要センサーが集中している場所) を検査しています (上の写真)。従来の無人水中車両は人間のオペレーターによるリアルタイムの制御を必要としますが、アクアノートはそのセンサーとコンピューティング システムのおかげでより強力な自律機能を実証しており、オペレーターの監督下で直接制御することなくタスクを実行できます (下の図を参照)。 従来のROVと比較したアクアノートの主な利点は、制限なく動作できることです。ただし、HMI がこの機能を確実に実現するには、いくつかの重要な問題を克服する必要があります。まず、大型支援船を使わずにロボットを現場に運ぶ方法です。アクアノートは比較的小型のボートから出撃したり、ヘリコプターで目的地まで輸送したりすることもできるが、潜水艦モードでは200キロメートル以上移動することもできる。到着すると、ロボットはROVモードに変形します。船体内部には微調整用のスラスターが隠されており、柔軟に姿勢を調整できる。 変革自体も大きな課題であり、チーム内で白熱した議論を引き起こしました。アクアノートのチーフエンジニア、サンディープ・ヤヤティ氏(元NASA月探査プロジェクトの電力部門責任者)は、「変形は不要であることを証明したいという熱い思いで、私たちは意見が対立した」と語った。しかし、チームは最終的に、変形の利点がそれがもたらす複雑さを上回ると判断し、この意見によって水中の「トランスフォーマー」は現実のものとなった。 アクアノートの形状を大幅に変更できるように、ロボットには、胴体の上部と下部を互いに分離できる 4 つのカスタムメイドのリニア アクチュエータが搭載されています。さらに、ロボットには、ロボットアームとヘッドを駆動するための追加のカスタムモーターが防水シェルに取り付けられています。アクアノートは、電源として電気自動車に搭載されているものと同様のリチウムイオン電池を使用しています。現在、完全に変形するのにかかる時間はわずか 30 秒です。 しかし、これらの課題のどれも、アクアノートの制御システムの設計ほど難しいものではないかもしれません。従来のROVには複数のライブカメラフィードがあり、人間のオペレーターがジョイスティックを使用して車両をリアルタイムで制御します。現在、テザーがないため、アクアノートと通信する唯一の方法は音響モデムを使用することです。この成熟した技術は水中数十キロメートルの範囲をカバーできますが、遅延が大きく、伝送帯域幅が極めて低いという問題があり、1秒あたり数KBのデータしか伝送できません。 HMIは、ロボットと通信衛星間の中継役として小型無人水上船を利用する計画で、これによりアクアノートは世界中のどこからでも制御できるようになる。しかし、伝送制限が多すぎるため人間が直接操作することはできないため、アクアノートは自律機能を可能な限り高める必要があります。 「自律性は非常に重要です」とヤヤティ氏は説明した。「多くのタスクをロボットに委任できる自信が必要です。」 HMI は、アクアノートの高レベルの監視制御を維持しながら、ほとんどの低レベルの意思決定をロボットの強力なオンボード コンピューターに委任する予定です。これらのコンピューターは、研究用および商用ロボット向けの一般的なソフトウェア プラットフォームであるロボット オペレーティング システム (ROS) の実行を担当します。ロボットは、ステレオカメラ、構造化光センサー、ソナーシステムなど、頭部に搭載された一連のセンサーを使用して、周囲の詳細な 3D レンダリングを構築できるようになります。ただし、完全な 3D マップをオペレーターに送信するのではなく、非常に小さく高度に圧縮された特定の部分のみが返送されます。その後、オペレーターはそれを、アクアノートが見ている構造の既存のモデルと照合することができます。 次に、オペレーターは「特定の座標でバルブを時計回りに 90 度回転させる」などの比較的単純なコマンドを送信します。ロボットはバルブの掴み方と適用する力の量を自動で決定し、タスクが完了すると確認プロンプトを返します。一般的に、オペレーターは引き続きロボットの動作を指示する責任がありますが、直接的な手動制御や、帯域幅を大量に消費するリアルタイムのビデオ入力の必要性に依存することはなくなりました。 HMI の長期的な目標は、Aquanaut をサービスとしてのソリューションに変革することです。石油・ガス会社は、北海やカリフォルニア沖などの場所に配備された小型ロボットの艦隊を使用して、完了すべきタスクの詳細を提供するだけで、HMI が最も近いロボットを派遣してそのタスクを処理します。ラドフォード氏は、従来のROV 1台を操作するには約7人が必要だが、「この問題を解決できると考えています。1人のオペレーターが7台のアクアノートを制御できると考えています」と語った。 ヒューストン大学の機械工学教授で国際海底工学研究所所長のマシュー・A・フランチェク氏は、アクアノートは接続帯域幅が狭く、オペレーターが操作サイクルに断続的にしか関与しないため、エラーのリスクが高い可能性があると述べた。 「不確実な点がある」と彼は言う。「運用上の失敗や、財政的、環境的悪影響を懸念している。この技術は魅力的だが、期待通りに機能することがまだ証明される必要がある。」
▲写真:制御された環境でアクアノートをテストするために、HMI はロボットを世界最大級の屋内プールの 1 つである NASA の中性浮力研究所に持ち込みました。ここで宇宙飛行士は、国際宇宙ステーションの主要モジュールの実物大モデルを収容できるほどの広さを持つゼロ戦略環境で模擬訓練を受ける(写真の背景を参照)。 アクアノートの 3 日間のテストの後、開発チームは HMI オフィスの裏の駐車場で祝賀会を開催しました。私たちはスパイシーなザリガニの食事をし、ニューヨークのブルックリンにある醸造所のロボットフィッシュIPAの缶を飲みました。 NASA では、ロボット工学に関する話が飲み会の誘いのように広まり、私はザリガニの頭からおいしい汁を吸い取る方法を学びました。 テストがうまくいったことへの安堵感は、すぐに将来への期待に変わりました。ラドフォード氏は、現在のバージョンのアクアノートは主に比較的浅い水域向けに設計されたデモンストレーションおよびテスト用のプラットフォームであり、最大動作深度は 300 メートルであると説明した。このバージョンはすでに世界中で商業運用が可能だが、HMIは数百キロメートルを航行し、深さ3,000メートルまで潜水できるより大型のバージョンの設計を開始しており、メキシコ湾などの地域に新たな利益をもたらすと考えている。 もちろん、商業運用は、HMI が Aquanaut に設定した唯一のアプリケーション方向ではありません。ラドフォード氏は、米国防総省との潜在的な協力について情報を開示するのは都合が悪いと述べたが、2018年後半、国防高等研究計画局(DARPA)は「海底にある物体を航行し、物理的に操作できる海中自律システムを開発する」ことを目的とするアングラーと呼ばれるプログラムを発表した。DARPAの発表はアクアノートの発表と驚くほど重なり合っており、双方とも2本のロボットアームを備えた流線型のロボット潜水艦を使用すると述べている。これは HMI 企業にとって素晴らしいニュースのようです。 パーティーはまだ続いていますが、人々はすでに自分のデスクに戻り、アクアノートを次の NBL テストに向けて準備しています。初の外洋実証は、8月にロードアイランド州で行われる海軍技術演習中に行われる見込みだ。今年3月に生まれたばかりのこのロボットスターにとって、スケジュールはかなりタイトだが、ラドフォードはチームが確実に対応できると自信を持っている。 「このような大胆な仕事をするのは楽しい」と彼は結論付けた。「水中での作業には、間違いなくもっと良い、より費用対効果の高い方法があると思います。私たちはそのことを証明するつもりです。」 |
>>: Golang GC についていくつか誤解がありますが、本当に Java アルゴリズムよりも高度なのでしょうか?

推薦する
人工知能の主な発展とその原動力
本日の講演は、アリババCIOアカデミーが開催した人工知能(AI)技術に関する特別研修コースのために賈...
アマゾン ウェブ サービスが中国で新たな機械学習サービスを開始
[51CTO.com からのオリジナル記事]現在、ますます多くの企業が機械学習や人工知能に多額の資金...
米国はチップ供給を遮断、ロシアはリソグラフィー装置の再構築を決定
この記事はAI新メディアQuantum Bit(公開アカウントID:QbitAI)より許可を得て転載...
人工知能が幼稚園のキャンパスに参入し、あらゆる面でキャンパスの安全を確保
近年、幼児教育のスマート化を導き、子どもたちの学習と成長をサポートするスマート幼稚園環境を総合的に構...
AR/AIバーチャル試着室は社会的距離の確保対策への対応
COVID-19 は小売業界に大きな混乱をもたらしましたが、新しいテクノロジーはこれまで以上に重要な...
ロボット革命が到来。人類社会はどう対応すべきか?
ロボット革命は、2009年に英国王立工学アカデミーが発表した「自律システム」と題する科学報告書で提唱...
人工知能は企業で実用化されつつある
AI は、従来のプロセスや従来のテクノロジーにまき散らされた魔法の精霊ではなく、ビジネスのやり方を根...
データは1/5000に縮小されたが、モデルの精度は2倍に。Googleの新しい「蒸留法」が人気に
[[441258]]この記事はAI新メディアQuantum Bit(公開アカウントID:QbitAI...
Oracle データベース初期化パラメータの分析: システム構成を最適化するための究極のガイド!
Oracle データベースでは、初期化パラメータは非常に重要な構成項目であり、データベースのパフォ...
データ管理はAI革命の最大の課題となるでしょうか?
最新のデータへの投資は人工知能の拡張を成功させる上で重要ですが、調査によると、企業の半数がコストの障...
人工知能は人類に潜在的に壊滅的なリスクをもたらす
11月1日、米国、英国、中国を含む28か国がブレッチリーで開催された第1回世界人工知能(AI)セキュ...